В 2013-2017 годах я писал собственный физический движок, в котором LCP решается через систему неравенств для скоростей: каждое неравенство вводит в систему ограничение свободы для пары столкнувшихся тел, солвер итеративно решает столкновения путем корректировки скоростей. Это универсальный, но вычислительно недешевый метод, к тому же подверженный эффектам нестабильности. Импульсная физика хороша для движущихся тел, но не очень стабильна в состояниях покоя – тела часто дрожат, и для их “успокаивания” приходится вводить различные уловки и хаки, которые неизбежно вводят в систему ошибки, понижая точность симуляции.
В импульсных движках используется интегрирование Эйлера:

Где Δx – скорость частицы – интегрируется аналогичным образом на основе ускорения:

Таким образом, “физично” подействовать на частицу можно только через скорости и силы. Все ограничения в систему вводятся только через скорости – модифицировать позиции тел вручную нельзя, что делает импульсную физику в играх менее удобной для определенных геймплейных задач. Однако существует альтернативный подход на основе интегрирования Верле:

Из формулы получается, что для частицы не нужно хранить скорость, но нужна позиция с предыдущего шага интегрирования.
for (size_t i = 0; i < positions.length; i++)
{
Vector3f currentPos = positions[i];
positions[i] += (currentPos - oldPositions[i]) + freeFallAcceleration * (dt * dt);
oldPositions[i] = currentPos;
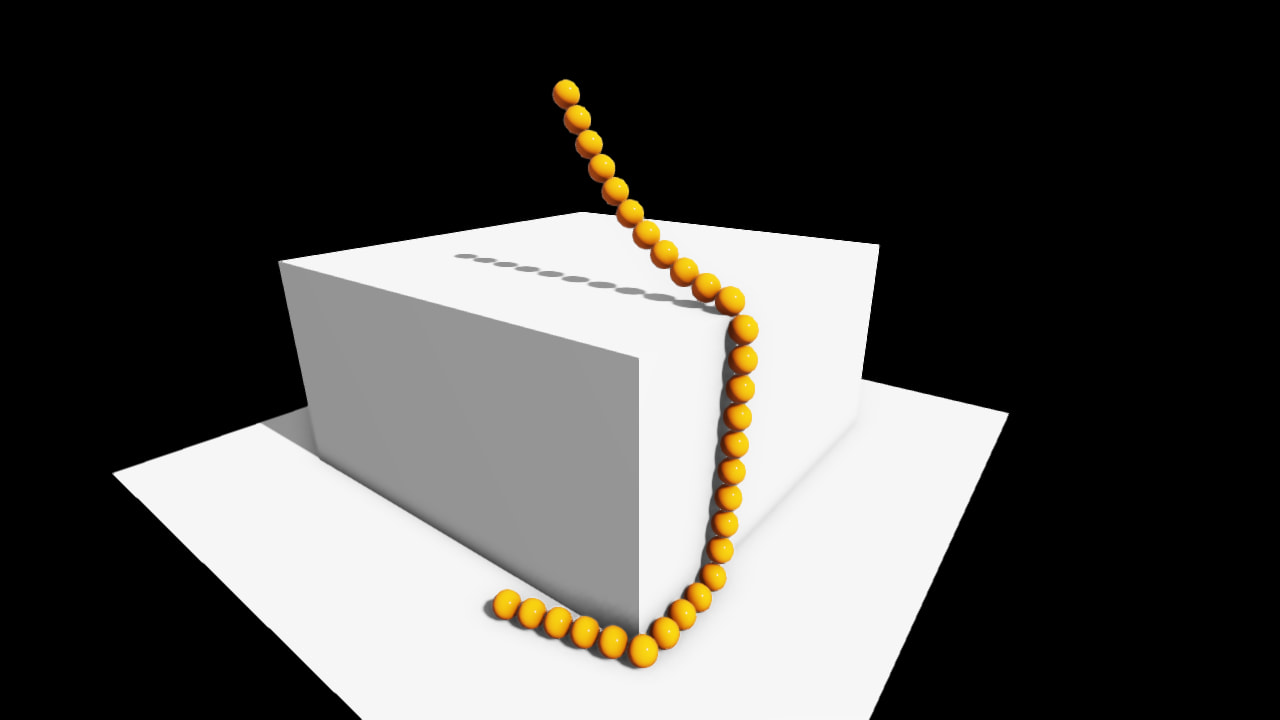
}Метод Верле позволяет легко вводить в систему ограничения: чтобы их решить, нужно итеративно скорректировать позиции частиц. Например, в случае с веревкой – то есть, набором последовательно соединенных частиц – расстояние между ними делается таким, каким оно должно быть (то есть, позиции частиц корректируются так, чтобы расстояние между ними не увеличивалось и не уменьшалось):
for (size_t i = 0; i < positions.length - 1; i++)
{
Vector3f pos1 = positions[i];
Vector3f pos2 = positions[i + 1];
if (i == 0)
positions[i] = attachPosition;
Vector3f diffVec = pos1 - pos2;
float dist = distance(pos1, pos2);
float difference = 0;
if (dist > 0.0f)
difference = (nodeDistance - dist) / dist;
Vector3f translation = diffVec * (0.5f * difference) * stiffness;
positions[i] += translation;
positions[i + 1] -= translation;
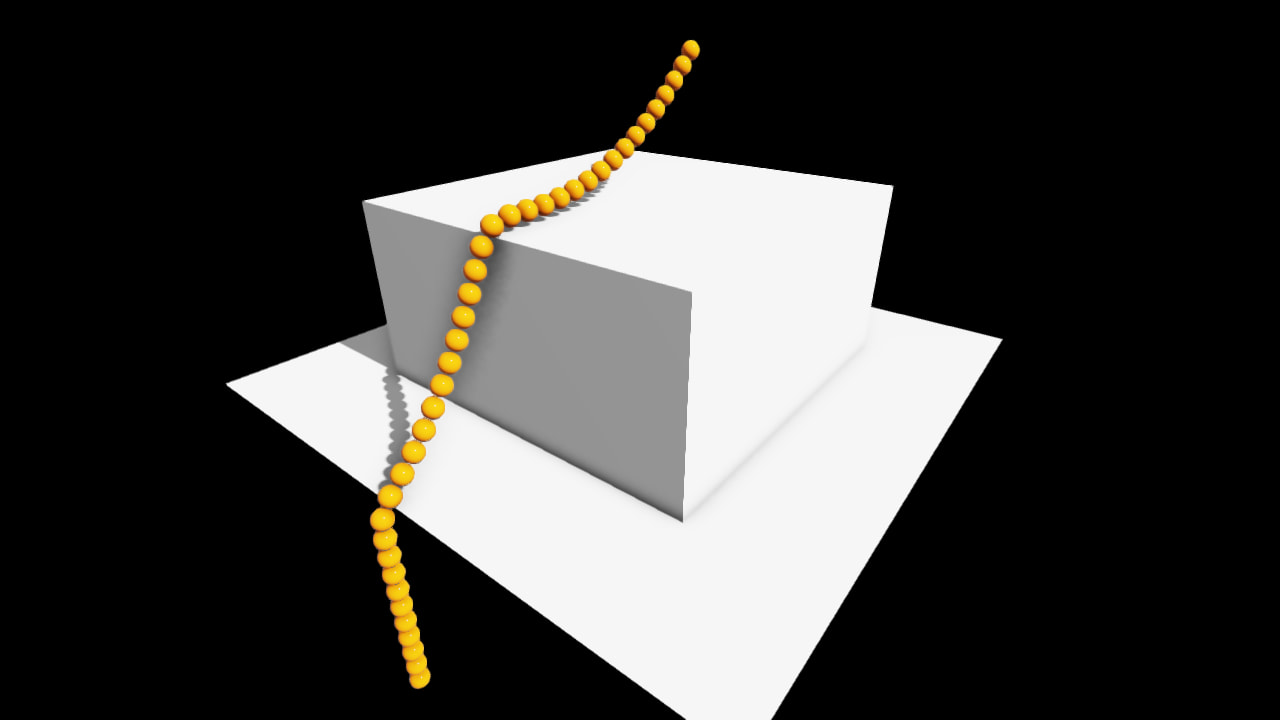
}Аналогичным образом разрешаются столкновения: для частиц вводится объемная оболочка (например, сфера), взаимопроникшие тела перемещаются в кратчайшем направлении так, чтобы их оболочки не пересекались. Алгоритмы проверки столкновений обычно дают необходимую для этого информацию – нормаль и глубину проникновения. Преимущество перед импульсным подходом в том, что для этого не нужно составлять систему для скоростей – вы можете напрямую корректировать позиции и, таким образом, легко реализовать любую модель столкновений.