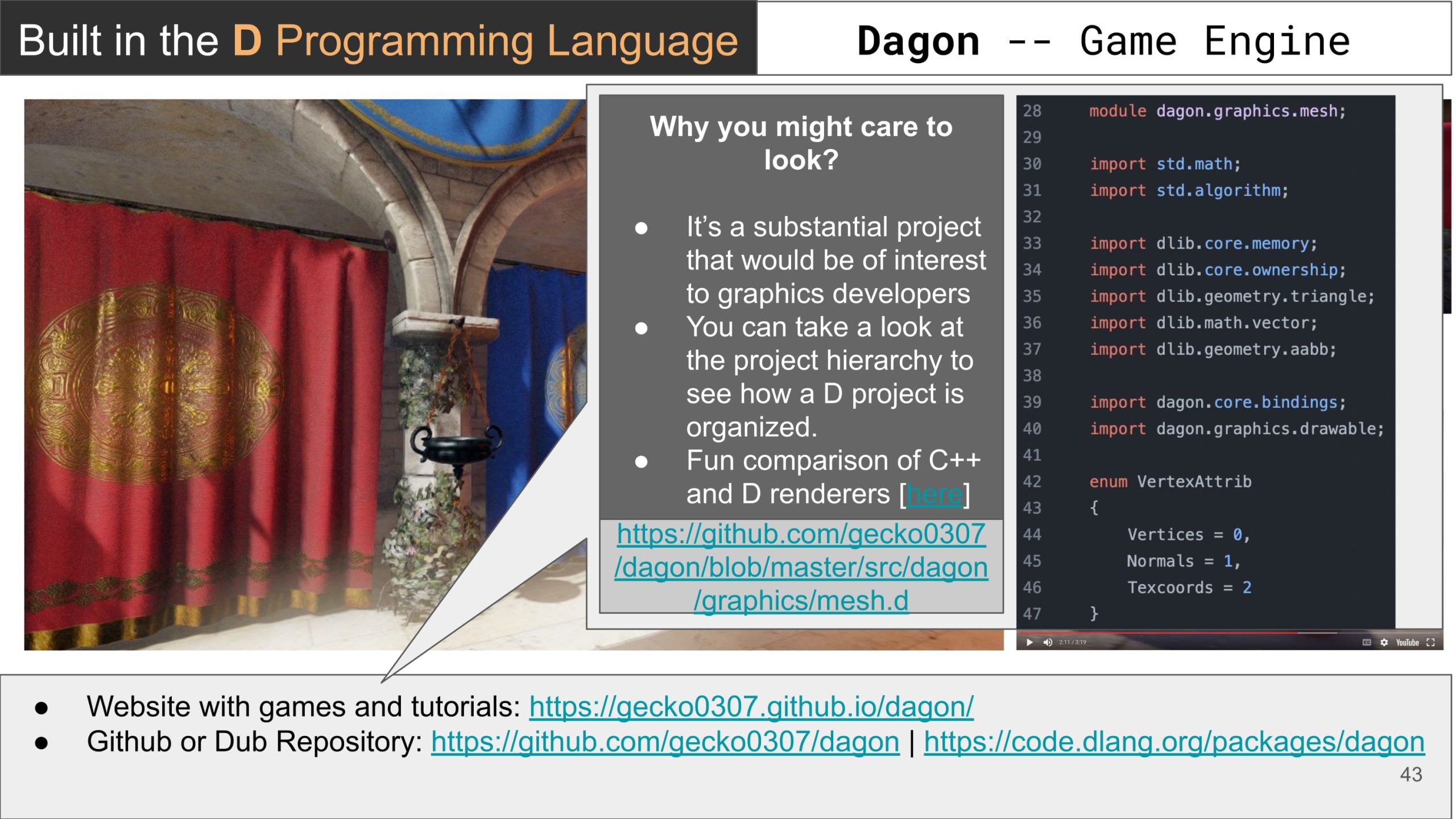
Классная новость: на прошедшей в феврале в Брюсселе FOSDEM ’24, европейской конференции по свободному программному обеспечению, американский профессор компьютерных наук Майк Шах (Mike Shah) представил доклад по языку D. В числе прочего, доклад включает информацию по Dagon. Отмечается, что это “существенный проект, который представляет интерес для графических разработчиков”. Также упоминаются Dash, Hipreme Engine, BindBC и некоторые коммерческие игры, созданные с использованием D.
Ссылка на презентацию
Доклад представляет собой общее ознакомление с языком, обзор основных его особенностей и преимуществ в плане разработки СПО, а также некоторых библиотек и примечательных проектов, написанных на D.
Майк Шах – ученый в области компьютерной графики и визуализации, Ph.D. компьютерных наук, преподаватель Колледжа компьютерных наук Хури Северо-Восточного университета (Массачусетс).